Waveforms, Sampling, RMS , ... Why are they important for protection?
- Rodney Hughes
| Rod Hughes Consulting General Web Site | Applications Home | Innovations and Solutions Home | A bit about Rod Hughes |
|
|---|
Note - if the navigation pane on the left of this window is not visible, click the 2-pane icon on the top bar
Welcome to the world of Digital Acquisition Chains applied to protection functions!
Until the very late 1970’s, protective relays (as well as meters and instruments) worked on flow of current creating flux, which in consequence created magnetic force to operate an armature or disc that closed/opened a contact.
It was all “natural electromechanical flux physics”.
The release of the GEC MCGG microprocessor overcurrent relay in 1981 meant "everything" changed dramatically - we needed to use numbers to determine if something was above or below a threshold.
Of course “why” we wanted to change from “perfectly good” natural electromechanical physics is an interesting story to tell in its own right – to overly simplify at least some of the reasons for the purposes of this page, it meant that protection functions were not constrained by the physics of construction of the device. We could do other things to tweak performance, combine functionality, simplify manufacture ... In Australia, the MCGG was released with the controversial marketing logo "Buy one, get six free!" meaning that the one device could be set to any one of seven different operating curves which in the past would have to be purchased as physically different CDG types with different curve shapes and setting ranges after all the grading studies had determined which one you needed. Interesting to note that despite being microprocessor based:
- MCGG did not use an algorithm formula as quoted in IEC 60255-151 or IEEE C37-112, it used Logarithm look-up tables to determine the required operating time for a given magnitude of current.
- it was still just a single function overcurrent relay MCGG11 replaced CDG11 or CDG12 or CDG13 ...., MCGG21 = CDG21 ..., MCGG61 = CDG61
The question of sampling the waveform perplexed and bewildered many an engineer throughout the 80’s as to the impact of digitalisation and how we converted flux into maths.
Organisations like CIGRE spent many an hour at various conferences world-wide with discussions about the impact and benefits/problems of digitalisation of protection functions.
We are still grappling with this as we get more and more into the much more onerous requirements of the power systems and the effect of transients, harmonics, high frequency disturbances, noise, saturation and even travelling waves.
This page simply sets out what sampling of a waveform means in a digital world. The signal processing as anti-aliasing, Fourier Tars forms, Discrete Fourier Transforms or other techniques of manipulating or filtering of the samples is beyond the scope of this information simply because that is very much "vendor dependant" on their hardware, software platforms and choice of algorithms for the different functions and performance requirements.
However this information may assist you in considering the implications and reasons why different vendors have chosen to do different things or in certain ways,
.... or perhaps what you might have to think about if the vendor has given you a choice of signal processing and algorithms.
The problem of Sampling!
We can sample the waveform and identify the magnitude of the current at any instant as a number.
But a single number is not particularly helpful on its own.
Taking one sample every cycle is clearly not indicative of the actual current waveform.
Add the complexity of waveforms that are not perfectly sinusoidal or balanced on all phases.
Then consider needing to add/subtract/multiple/divide those numbers from different measurement sensor inputs - using samples taken at t=1 in combination with samples taken at t= “5”, “16” and “72” is not going to work, so we need the samples to be synchronised and time-identified (more numbers) so you are using the value of the samples taken at the same instant, or perhaps “mathematically adjusted” by interpolation to seem to be taken at the same instant.
Next consider transients in the primary.
Or “fake secondary waveforms” such as the removal of primary voltage from a Capacitive Voltage Transformer, the effect remnant flux has on the first few cycles, or a CT (perhaps even the relay internal CT) experiencing “ankle point” performance at low currents or saturation above “knee point”.
This is all comes under the general domain of the Digital Acquisition Chain, and signal processing.
Back to the point ..we have to sample the waveform and make a series of numbers for each instant of the samples.
Of course we could assume that all relays are the same and work perfectly under any all scenarios .. just as all “natural electromechanical flux physics” relays have done for over a century ... well, lets not dwell on th problems they sometimes had in doing what we had hoped they would!
Sampling Rates
Given we have to sample to turn flux from current/voltage into numbers, we could decide we want to sample at 80 Samples Per Cycle, i.e. is system frequency dependant, giving 50 Hz sampling at every 250 microseconds (60 Hz 208⅓ microseconds) ... case in point: the UCA IUG Guideline 2004 & 2010 colloquially called “IEC 61850-9-2LE” which is not an official industry “Standard” as such.
However we equally could decide we are going to take 4800 Samples Per Second, i.e. every 208⅓ microseconds regardless of system frequency. This gives us 96 samples per 50 Hz cycle (80 samples 60 Hz) ... case in point IEC 61869-9 (2016) which is a Standard.
The first thing to note is that the somewhat bizarre number of 208⅓ microseconds! That is “just one of those things” that the gurus in the Standards committees settled on after much debate – so we have to just accept that!
The point however is that the mechanism to control the sampling instant is now much simpler in not having to accurately track system frequency (which in itself would require sampling and calculations!!!).
Using Samples Per Second means we just need an accurate clock that every sensor is time aligned to for the start (and end) of each one second window.
Waveform
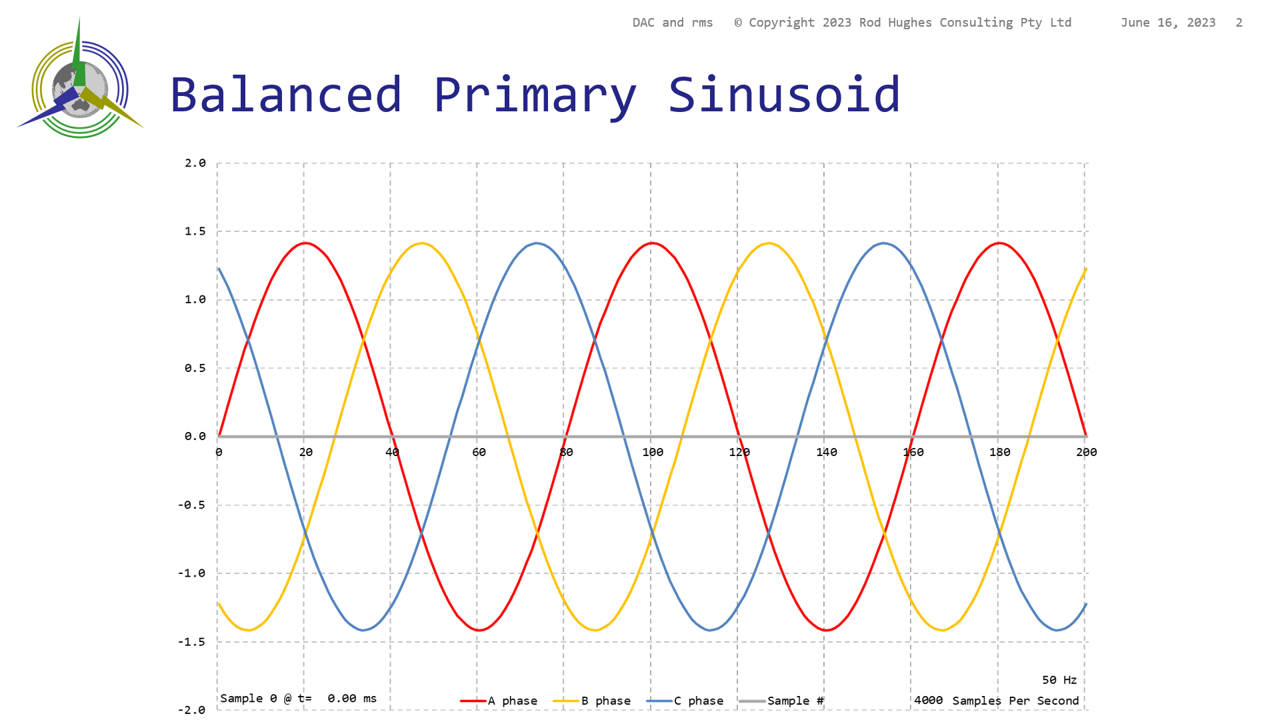
Consider we have a 50 Hz system of perfect steady state sinusoid without any offsets or glitches.
For this analysis to keep the spreadsheet accurate, let’s use 4000 samples per second (one sample every 250 microseconds)
We know the primary power system waveform looks like this:
But what the relay microprocessor sees is this .. a series of instantaneous values where as a chart against time we can see the approximate shape of the waveform.
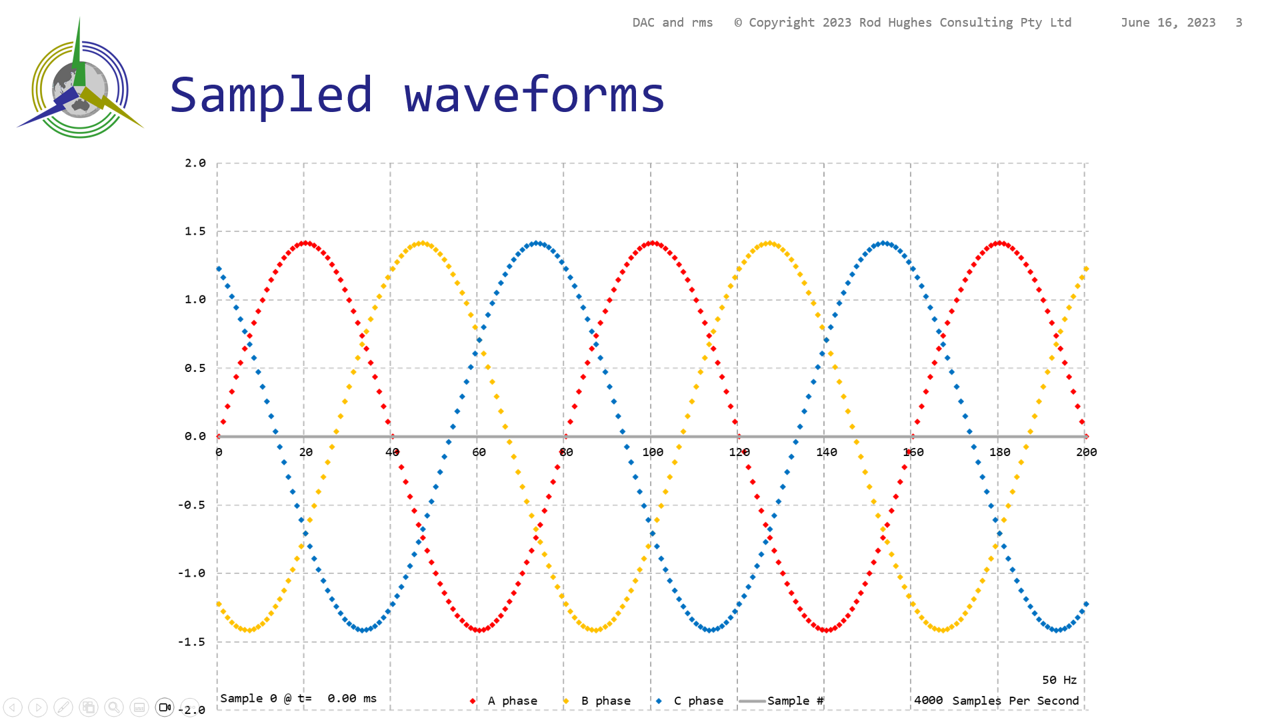
It is not the exact waveform because each new sample updates and we only update that at the next sample .. so we have a step change every sample, although we could do some form of interpolation to guess the intermediate values.
So what can we do to change these numbers to be able to set the threshold value for the function to operate. We usually do that in terms of the RMS value ... the Root of the Mean of the Squares.
Hence RMS is inherently mathematical, not flux, so that is a good match for the function operation!
Looking closely at RMS we see the Mean is the central step. Mathematically that means adding all the values (the Squares of the samples) and dividing by the number of samples that we added up.
Also mathematically, we know that “in the limit” of an infinite number of samples, the RMS value of a perfect sinusoid is the peak value / SQRT2 = 0.7071 x peak, or in other words an RMS value of 1 has a peak instantaneous magnitude of 1.414....
However we don’t have an infinite number of samples so even the RMS value is just a representation/approximation of the actual power system, but at least it is a number.
Lets break down what the relay is dealing with as samples
What is RMS as a mathematical process?
RMS perfectly describes the maths “in reverse” order: the value is the square Root of (the Mean of (the Squares)).
With each sample,
1. Square each value to get rid of negative values (because the mean of equal positive and negative values at two points in the cycle is zero).
2. Add the last “n” of those Squared values together
3. Divide by the number of samples to get the Mean (average)
4. Take the square Root of the of that Mean
We now have the RMS value of a waveform based on the last “n” samples.
Then we can do that all over again with the new sample, but still just using the last “n” samples .. in other words, we add a new Squared and deduct the oldest so we can get a new calculation of the RMS estimate according to that rolling/sliding window of “n” samples.
... and where do we get the samples from? Indeed the relay could get them its own analogue/digital converter, or from the IEC 61850-9-2 Sampled Value stream or indeed we as people can get them from a Disturbance Recorder usually in the COMTRADE file format and then “play with them” in Excel as I shall do now!
Result of RMS calculation on a set of non-steady state and/or non-symmetrical and/or non-sinusoid samples?
The first and main question for doing RMS calculations is: how many samples do we need to get the RMS value of a steady state perfect sinusoid? The result should be a fixed value precisely = peak/√2.
Here are a set of values taken at 4000 samples per second (=80 samples per cycle @ precisely 50 Hz with a 20 millisecond period) using
a) Five samples (1/16th of a cycle period shown as "rms5" in the chart)
b) Ten samples (1/8th of the cycle period shown as "rms10" in the chart)
c) 20 samples (quarter of the cycle period shown as "rms20" in the chart)
d) 30 samples (half of the cycle period shown as "rms30" in the chart)
e) 40 samples (half of the cycle period shown as "rms40" in the chart)
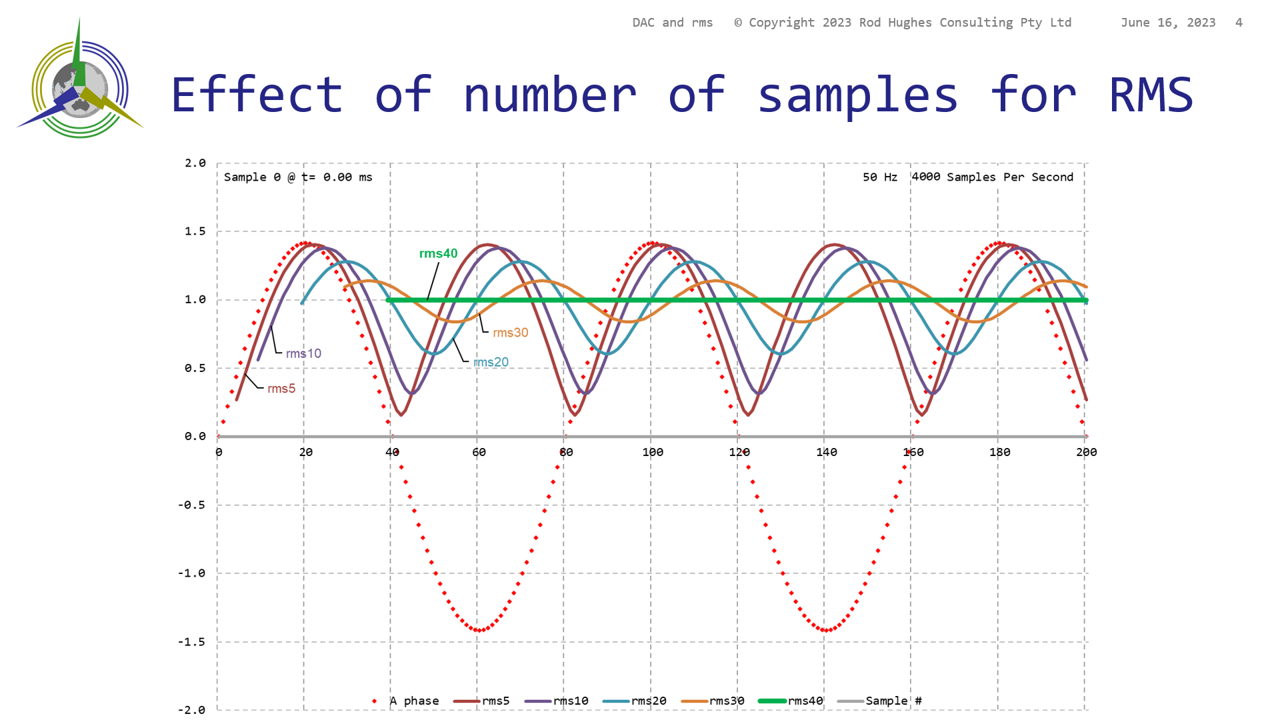
We can clearly see that we have an incorrect value of the RMS until we use a full set of samples over half the period of a cycle of samples as shown in the flat green line perfectly in accord with the pure sinusoid of 1 per unit RMS.
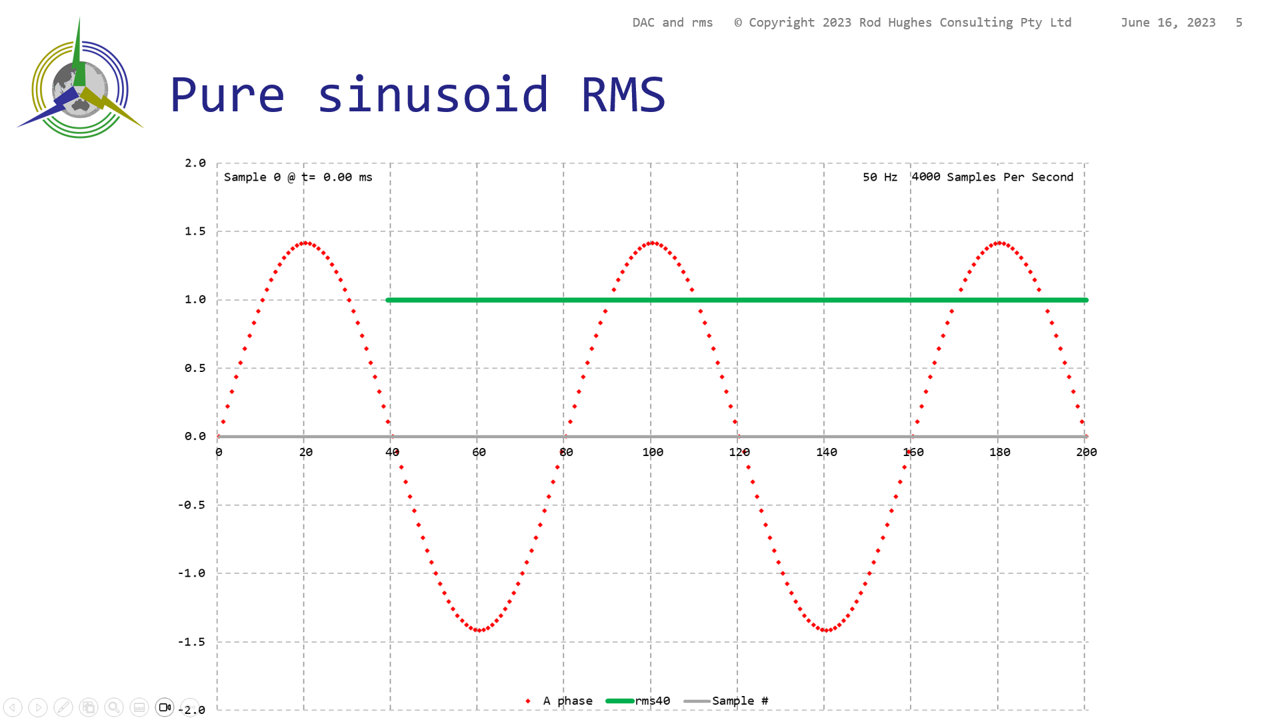
... and so you exclaim with great joy “Aha!! Eureka!! ... We can get all our RMS values from just half a cycle of samples”
Well .. bad news, no!
Whilst half a cycle’s worth of samples is true for a pure sinusoid at steady state, that is not true of our power system .. especially when we need fast protection operations of perhaps even just one cycle.
We suddenly find at least six problems (ignoring transformation accuracies)
1. The sampling window starts before the zero crossing fault inception
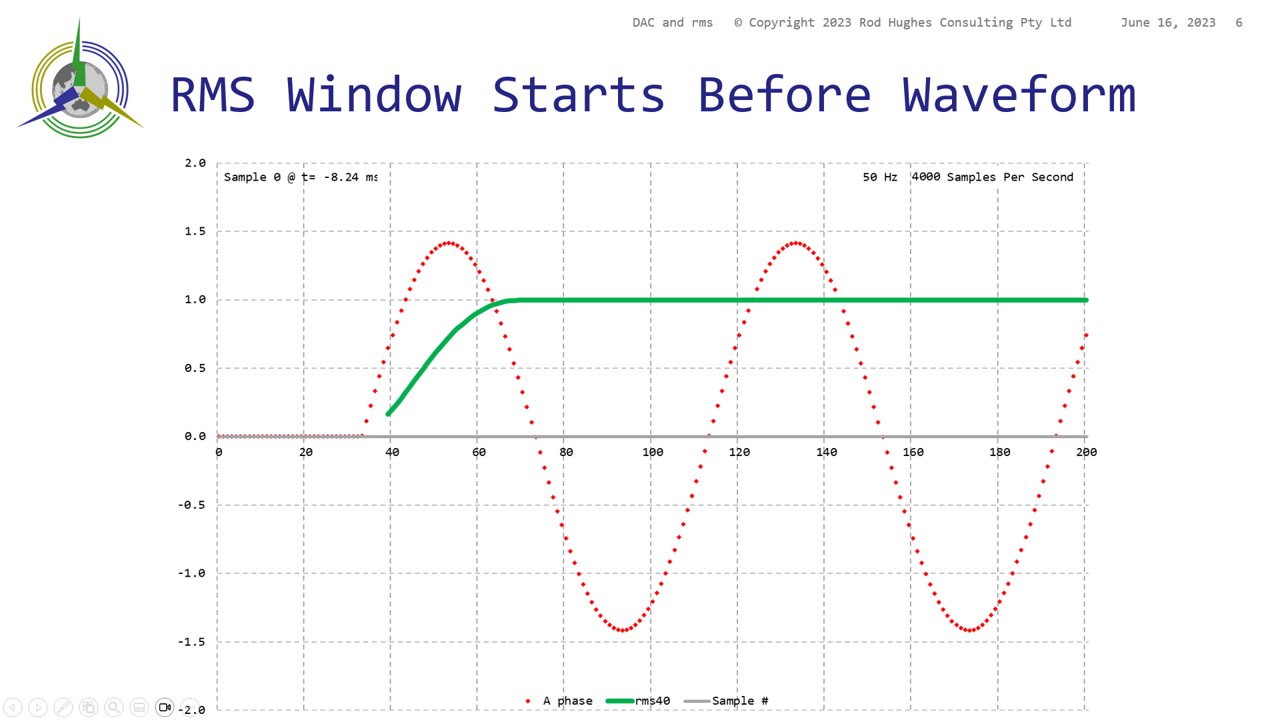
We can clearly see an error for a period of time until the calculation is using steady state samples for the entire sampling window.
2. Point On Wave Fault Inception
The fault occurs part way through a cycle (point on wave) so our initial RMS number is slightly off .. somewhat critical for fast protection!
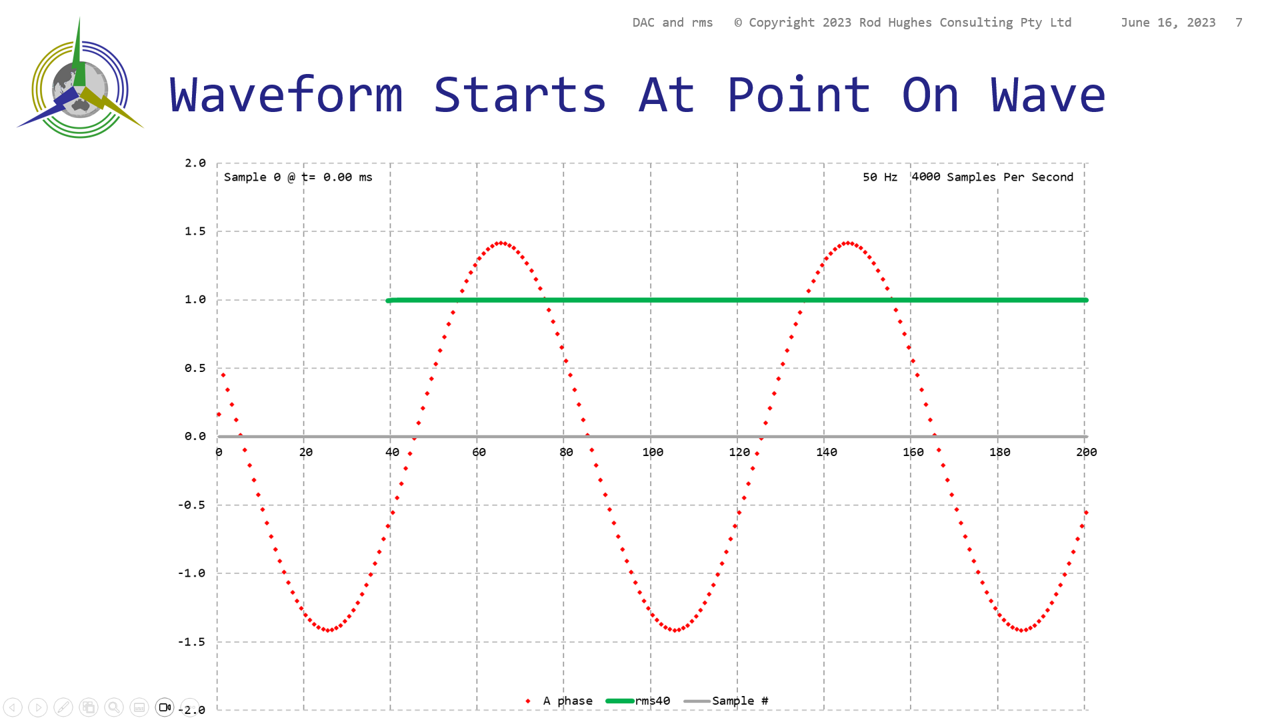
This is actually not too bad .. except we have no value of RMS value for the initial period, but tat is true of any RMS calculation.
3. d.c. Offset Transients
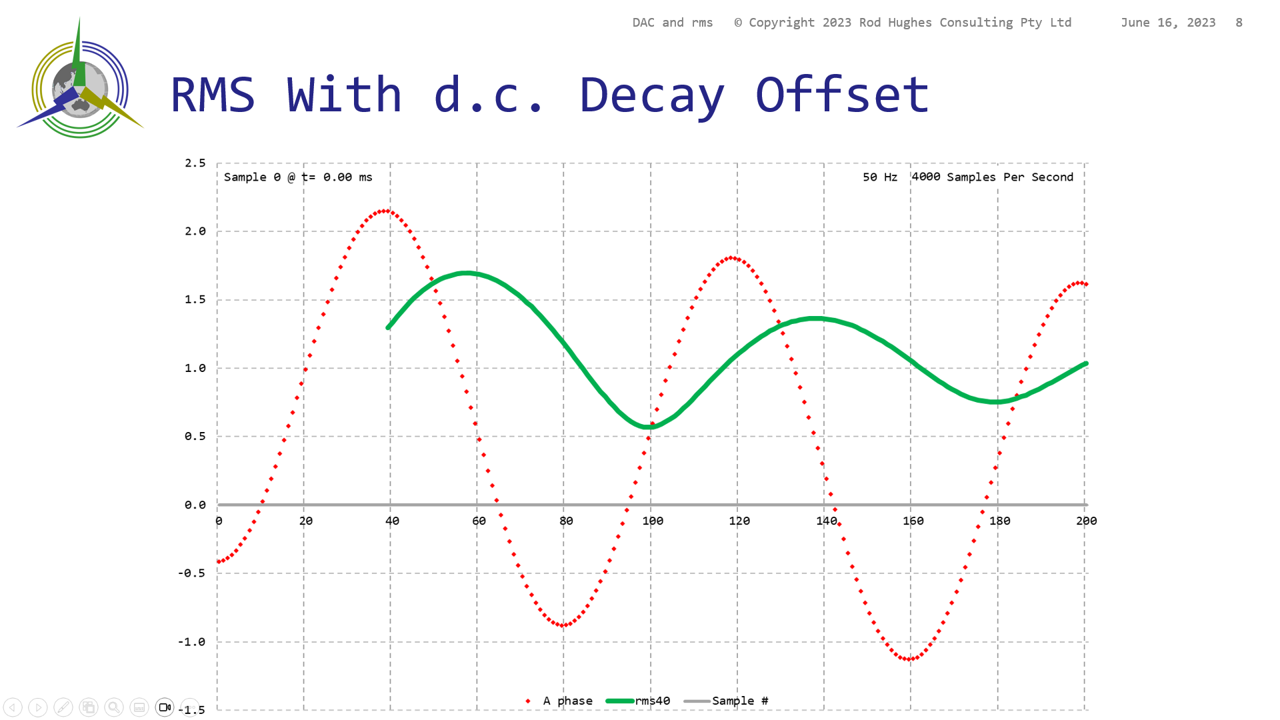
That is definitely not a straight line value of 1 per unit steady state waveform .. at what point do you decide is the current above or below the operating RMS threshold?
4. Combination of all three!!!

Need I say more?
5. Harmonics
We also have another power system condition as a complication ... Harmonics.
To deal with this I have constructed a waveform from the sum of the fundamental 55% (i.e. 0.55 per unit RMS ) plus four harmonic components in addition to the fundamental 2 (10%), 3 (20%), 5 (10%), and 7th (5%).
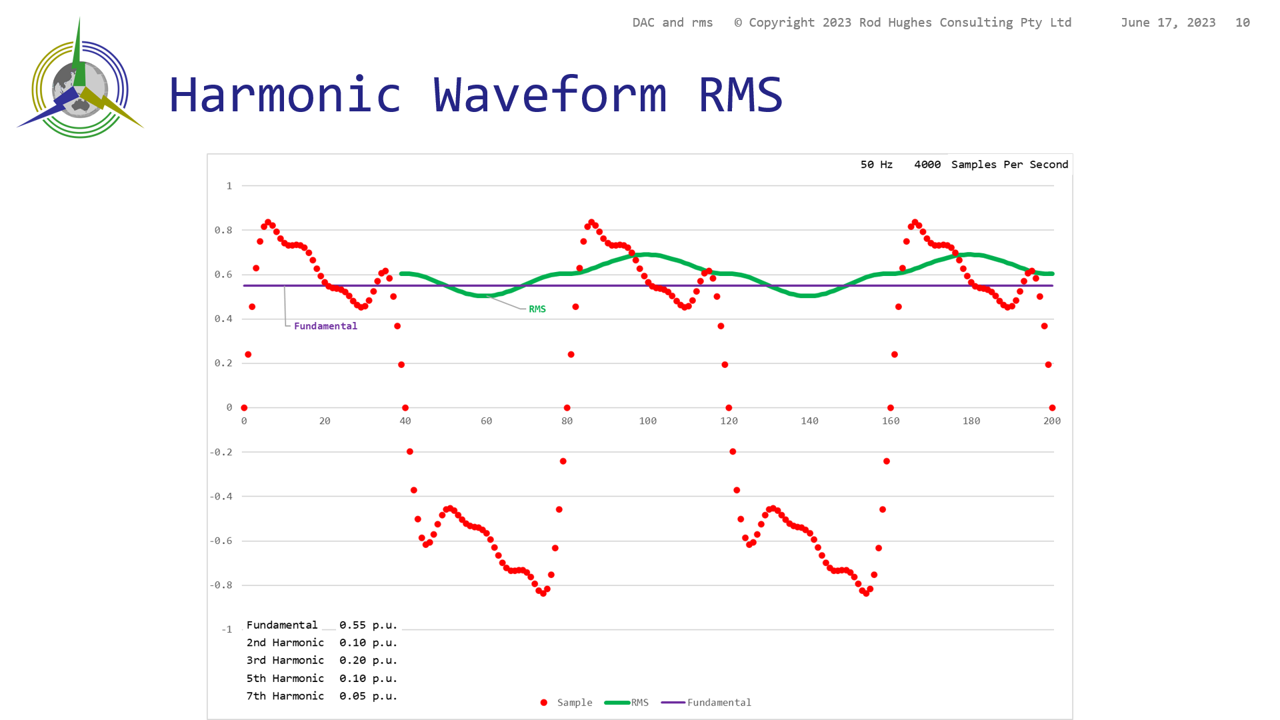
The purple RMS calculation is a bi wobbly. but it is generally higher than the straight line 55% if we extracted just the fundamental .. so again a conundrum .. what does the wobbly line really mean?
Well, form a 50 Hz point of view it is not particularly helpful .. we can't really compare that properly to a fixed overcurrent pick up setting of an overcurrent or earth fault element!
On the other hand the RMS of the pure fundamental is!
But on my third hand the lower value of the fundamental RMS component doesn't equate to the thermal condition of the plant or equipment where the full harmonic content is appearing.
So we can see this is very much application-dependant on what we need to use.
6. CT Saturation
We have yet one more complication ... c.t. saturation!
Lets go all the way back to our steady state waveform, no offset, no power system harmonics .. but obviously harmonics in the secondary waveform created by the ct saturation
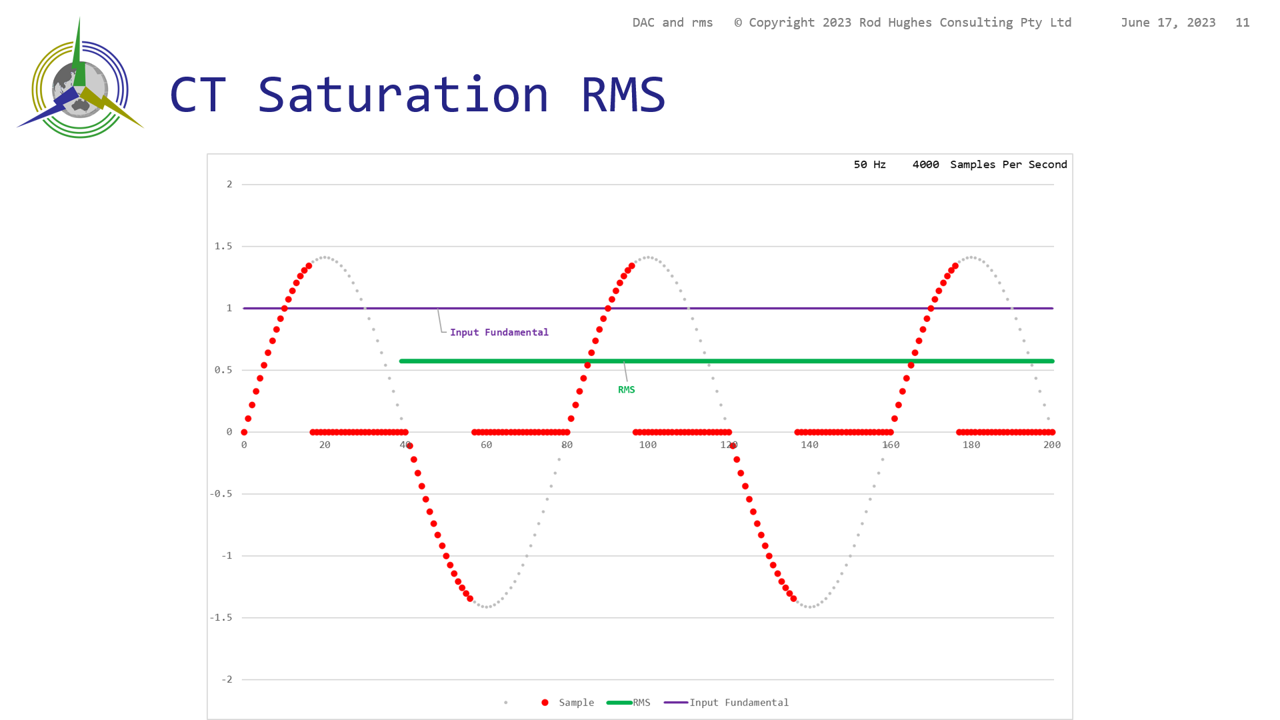
Here we see the applied primary system Fundamental (purple line) is 1 per unit, but the calculated RMS (green line) of the saturated waveform samples is considerably less.
We would have to do a Fourier Transform to convert those samples back to a set of harmonics to "extract", "filter" or "isolate" just the fundamental component of those saturated samples.
As you can see, the digital/numeric/algorithm world of modern protection relaying is not so straight forward.
It is even more complex if you then require to summate different inputs, multiply/divide or subtract (differential) inputs, consider switching transients and even use samples created by different manufacturers Merging Units in an IEC 61850 Sampled Value application (and indeed whether they are both or a mix of either UCA IUG Guideline 80 Samples Per Cycle or IEC 61869-9 4800 Samples Per Second) .....!!!
CIGRE published an interesting Technical Brochure 768 (2019) on the issues associated with the Digital Acquisition Chain: https://cigre.tiny.us/mmfw2khj
Aside: r.m.s. or rms or RMS?
For many years I have used r.m.s. as the abbreviation for "root mean square". This was at least partly supported by usage in
- IEC 80000 Quantities and units – Part 6: Electromagnetism uses lower case rms,
- IEC 60375 Conventions concerning electric circuits uses upper case RMS.
- IEC 61869 (2016) "Instrument transformers – Part 1: General requirements" and its predecessor IEC 60044-1 (1996) using lower case r.m.s. with the periods
- IEC 60255 Measuring relays and protection equipment – Part 151: Functional requirements for over/under current protection uses upper case RMS
- IEC 61850-7-4 Ed2.1 (2020) lower case rms as well as RMS
- Of course there is also the "most revered" text book being the GEC (or other vendor name changed versions) "Protective Relay Application Guide" using lower case r.m.s. with the periods
But today I stand corrected by the IEC Vocabulary https://www.electropedia.org/iev/iev.nsf/display?openform&ievref=103-02-03 and its notation published 2017:
"Note 5 to entry: The abbreviation RMS was formerly denoted as r.m.s. or rms, but these notations are now deprecated."
Although some would no doubt say 132 kVRMS or 132 kV RMS doesn't quite look as "nice" as 132 kVrms or 132 kVr.m.s. in a similar sprirt to 132 kVa.c. or 132 kV a.c. .... !! 🤔☹️
Share this permanent short link to this page: https://rhconsult.tiny.us/czxy24c2
- Protection Systems Engineering
- IEC 61850 Engineering
I provide a range of courses for company-specific in-house training and occasional public invitation courses. Contact me for details.
Contact Me
A phone call is nearly always welcome depending on the time of night wherever I am in the world.
Based in Adelaide UTC +9:30 hours e.g.
| April-September | Noon UK = 2030 Adelaide |
| October-March: | Noon UK = 2230 Adelaide |
Mobile + 61 419 845 253
Extra Notes:
No Waiver, No Licence:
Rod Hughes Consulting Pty Ltd accepts no direct nor consequential liability in any manner whatsoever to any party whosoever who may rely on or reference the information contained in these pages. Information contained in these pages is provided as general reference only without any specific relevance to any particular intended or actual reference to or use of this information. Any person or organisation making reference to or use of this information is at their sole responsibility under their own skill and judgement.
This page is protected by Copyright ©
Beyond referring to the web link of the material and whilst the information herein is accessible "via the web", Rod Hughes Consulting Pty Ltd grants no waiver of Copyright nor grants any licence to any extent to any party in relation to this information for use, copy, storing or redistribution of this material in any form in whole or in part without written consent of Rod Hughes Consulting Pty Ltd.